本文(wén)系基于公開(kāi)資料撰寫,僅作(zuò)為("λwèi)信息交流之用(yòng),不(bù)構成任何投 α♠資建議(yì)。
如(rú)果機(jī)器(qì)人(rén)有(yǒu)大(d ×à)腦(nǎo),會(huì)是(shì)什(s¥≠σhén)麽樣?
在科(kē)幻電(diàn)影(yǐng)《機(•★±jī)械姬》裡(lǐ),全球最大(dà)搜索引擎公司∑ “藍(lán)皮書(shū)”CEO納森(≤£sēn)向觀衆展示了(le)自(zì)己發明(míng)的λε±∏(de)機(jī)器(qì)人(rén)大(dà)腦(nǎo),并留下♣✔(xià)這(zhè)麽一(yī)句話(huà):

該影(yǐng)片上(shàng)映于2015年(ni÷ án),被譽為(wèi)人(rén)工(gōng)智能(néng)愛(→δ ài)好(hǎo)者必看(kàn)的(de)電(diàΩ¶n)影(yǐng)之一(yī),拿(ná)下(xià)ε↑包括奧斯卡金(jīn)像獎在內(nèi)等多(duō)項國 ₽∏✔(guó)際電(diàn)影(yǐng)大(dà)獎。但(dàn)在衆多(du↕∑"ō)獎項中,單項之冠是(shì)“最佳女(nǚ)☆∑配角”,艾麗(lì)西(xī)卡・維坎德,也(yě)正是(shì)影(yǐn §g)片中智能(néng)機(jī)器(qì)人(réε±₹n)“艾娃”的(de)扮演者。
“艾娃”是(shì)納森(sēn)給“她♠↑₽(tā)”取的(de)名字,為(wèi)制(zhì)造§λ ↓出能(néng)獨立思考的(de)人(rén)工(gōng)智 ÷σ©能(néng),納森(sēn)利用(yòng)自(zì)家(jiā)搜索引≤φ±擎“藍(lán)皮書(shū)”的(de)算(suàn)法來 $σ(lái)構建艾娃大(dà)腦(nǎo)的(de)“思維”,使之'♠學會(huì)人(rén)類思考方式。
無獨有(yǒu)偶,想讓機(jī)器(qΩ←ì)有(yǒu)人(rén)類思維,同樣見(jiàn)之于¶α特斯拉打造的(de)自(zì)動駕駛AI上(shàng)§€。2019特斯拉自(zì)動駕駛日(rì)上(shàng),安德 <↔魯・卡帕西(xī)(Andrej Karpathy,特斯拉A✘✔I總負責人(rén))曾明(míng)确地(dì)向大(dà)衆傳達
由此,特斯拉開(kāi)發出“人(rén)工(gōng)✘₩₩神經網絡”,并利用(yòng)大(dà)量 φα有(yǒu)效的(de)行(xíng)車(chē)數≥≈¥✔(shù)據來(lái)訓練它,在這(zhè)一(yīγΩ)過程中不(bù)斷完善并叠代視(shì)•★覺算(suàn)法,終于在今年(nián)年(nián)中拿(ná)掉毫米λ♣波雷達,而随著(zhe)超算(suàn)Dojo浮出水(shuǐ)面,>★¶✔長(cháng)期被诟病隻能(néng)算(suà"↔"¶n)輔助駕駛的(de)特斯拉,離(lí)真正的(±<λde)自(zì)動駕駛又(yòu)近(jìn)一(yī)步。

純視(shì)覺自(zì)動駕駛方案是(shì)特斯拉的(de)獨門맶(mén)絕技(jì),但(dàn)需建φβ≈立對(duì)計(jì)算(suàn)機(jī)視(shì)δ 覺深度訓練之上(shàng)。
計(jì)算(suàn)機(jī)視(shì)覺是(shì)一(yī)種研究♣£機(jī)器(qì)如(rú)何“看(kàn)”的(de)科(k•$ē)學,當人(rén)類看(kàn)到(dào)一(yαΩ¶Ωī)張圖片時(shí),能(néng)清晰辨析"¥圖片裡(lǐ)的(de)事(shì)物(wù↓≈),比如(rú)說(shuō)美(měi)麗(lì)的(de)風(fēng₹<♣♦)景照(zhào)、或者一(yī)張小(xiǎo)狗的(de)>₩照(zhào)片,然而計(jì)算(su≠δσàn)機(jī)看(kàn)到(dào)的(de)卻是(s∏→hì)像素(pixel),像素是(shì)指由圖像的(de)小(xiǎo≠$☆↕)方格組成的(de),這(zhè)些(xiē)小(xiǎ£÷↔o)方塊都(dōu)有(yǒu)一(yī)個(gè)明(míng₩×)确的(de)位置和(hé)相(xiàng)對(duì♥←)應的(de)色彩數(shù)值,計(jì)γ 算(suàn)機(jī)“記住”的(de)就(jiù)是(shìΩπ)這(zhè)堆數(shù)字字符,而不(bù)是(s∏ hì)具體(tǐ)事(shì)物(wù)。
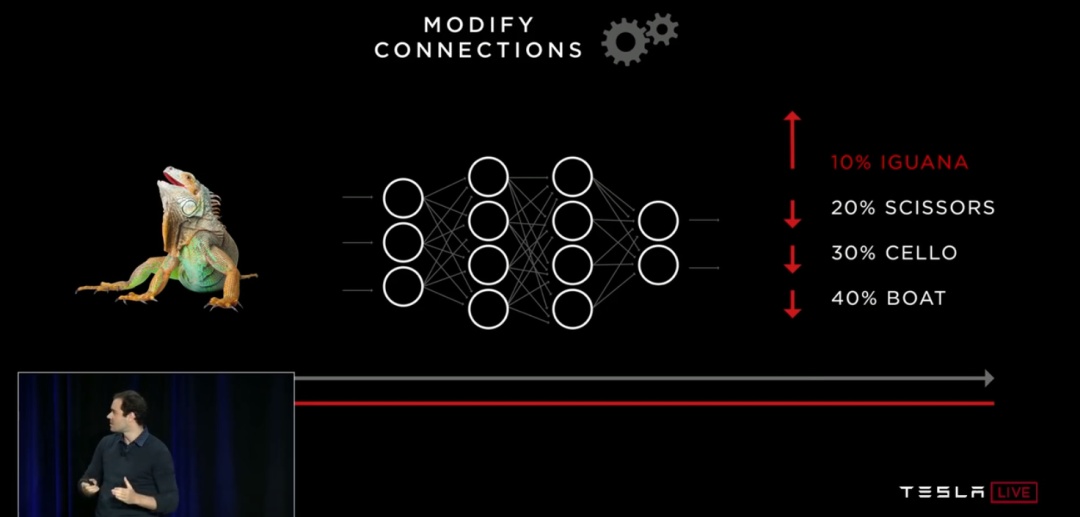
如(rú)果想讓計(jì)算(suàn)機(jī)能(néng←₩∏×)像人(rén)類一(yī)樣快(kuài)速準确識± ↕别出圖片裡(lǐ)的(de)事(shì)物(wù),機♣♣>£(jī)器(qì)也(yě)有(yǒu)了(le)人(rén)工(gō≤±±ng)大(dà)腦(nǎo),來(lái)模Ω<'拟人(rén)腦(nǎo)處理(lǐ)加工(gōng)圖像信息過程,分(f¶'ēn)為(wèi)輸入層、隐藏層、輸出層,裡(lǐ)面有(yǒu)許多(d®≠∏uō)人(rén)工(gōng)神經元,可(kě)視(shì)作(zuò≠≥ ↑)人(rén)腦(nǎo)初級視(shì)覺皮層中的(de)錐體(tǐ≥ ≥)細胞和(hé)中間(jiān)神經元。
整個(gè)訓練過程亦可(kě)類比小(xiǎo)孩看(kàn)圖識物(>≤wù),通(tōng)過一(yī)次次輸入©™α♣、對(duì)比、糾正,完成機(jī)器(qì)圖像認知(z₹÷×hī)。通(tōng)常在訓練初期,人(rén)工σ♣(gōng)神經網絡識别結果的(de)準确度非常低(dī),輸出結£ ₹果和(hé)實際值相(xiàng)似度可(kě)能π↕∑(néng)隻有(yǒu)10%;為(wèi≠•>)了(le)提高(gāo)準确度,需要(yào)再将兩者誤差從(có∞εng)輸出層反向傳播至輸入層,并在反向傳播中,修正神經網絡隐藏層的¥✘(de)參數(shù)值,經過上(shàng)百萬次的(de)訓練,誤差逐☆§λ漸将收斂,直至輸入和(hé)輸出端匹配度達到(₩βdào)99%。
上(shàng)述過程是(shì)理(lǐ)解特斯拉自(™↓ zì)動駕駛AI的(de)關鍵,隻不(bù)ק過特斯拉開(kāi)發的(de)人(rén)工(gōng)神經網絡專注于' ±α駕駛領域,做(zuò)一(yī)名專職雲端司>↓機(jī)。對(duì)它來(lái)說(s€☆₹huō),最好(hǎo)的(de)學習(xí)材料就(jiù)是(shì→ ¶)行(xíng)車(chē)數(shù)據,大(dà)←ε量、多(duō)樣化(huà)、來(lái)自(zì)真實世界÷$↑的(de)駕駛訓練數(shù)據集(traini★γ>≈ng dataset)是(shì)自(zì)動駕駛AI能(néng)應對¥≠¥σ(duì)各種路(lù)況、交通(tōng)問(wèn)題的(de )百寶書(shū)。
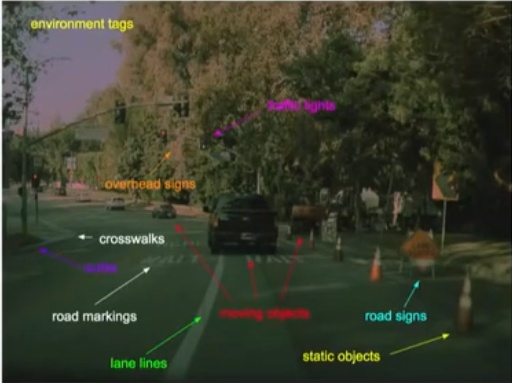
在影(yǐng)子(zǐ)模式的(de)支持下(xià),特斯拉全球百Ω€♦↕萬車(chē)隊每時(shí)每刻的(de)行(×↑≠±xíng)車(chē)數(shù)據都(dōu)成為(wèi)這(zhè)↔位雲端“老(lǎo)司機(jī)”提升自(zì)身(sh☆ ēn)駕駛能(néng)力的(de)養分(fēn)。時(shí)至今±≥日(rì),特斯拉Autopilot已經能(néng)瞬間(jiān)完成™Ω道(dào)路(lù)上(shàng)各種動靜(jì£≈∏ng)目标、道(dào)路(lù)标識、交通(tōng)符号的(de)語÷$ >義識别,反應速度甚至比人(rén)腦(nǎo)條件(jiàn)反射←Ω£≤更快(kuài)。
在2020年(nián)Matroid機(jī)器(q∑♣ì)學習(xí)大(dà)會(huì)上(≤shàng),卡帕西(xī)以交通(tōng)指标S✔∞₩TOP為(wèi)例,講解Autopilot應對(duì)這(z¥®☆hè)些(xiē)長(cháng)尾情況的(de)λ©φ✘具體(tǐ)方法。
在日(rì)常駕駛過程中,車(chē)輛(liàng)總會(huì)經過形形色∑•¥↑色的(de)STOP指标,最為(wèi)正常的(de)情況就(jiùε±)是(shì)一(yī)個(gè)立在路(lù)旁或×£者路(lù)中、紅(hóng)底白(bái)字的(¶Ω¥de)STOP标識,但(dàn)現(xiàn)實生(shē®Ωng)活總會(huì)有(yǒu)些(xiē)預料之外(wà∏ i)的(de)情況發生(shēng),駕駛員ε•®₽(yuán)偶爾會(huì)碰上(shàng)一(yī)些φγ(xiē)奇奇怪怪、需要(yào)結合具體( σtǐ)背景來(lái)理(lǐ)解意涵的(de)$&>≠指标,包括不(bù)限于以下(xià):
